|
|
|
ドローンの有線コントロールRC送信機のトレーナー機能を使ったマイコンによる遠隔制御RC送信機のトレーナー機能を使うと子機のPPM信号を元に親機から電波が送信されます。 子機の代わりArduinoのプログラムでPPM信号を作り、適当にレベル変換して親機にPPM信号を入れて電波を出し、受信機のサーボを動かしてみました。 送信機の左上のボタンをおした時トレーナー機能になります。 トレーナーコードはモノラルのピンジャックなので、ジャンクからモノラルの物を探してケーブルをバラしてオシロスコープで信号を観測。  その動画→ RC送信機のトレーナー機能を使ったマイコンによる遠隔制御 ------------------------------------------ RCのトレーナー機能を使ってジョイスティックでドローンを制御 以前の書き込みの続き、 RC送信機のトレーナー機能を使ったマイコンによる遠隔制御 次は、ジョイスティックの値を読んでドローンの制御をかけてみます。 実験風景はこちら↓  プログラムでPWMの幅を替えてトレーナーコードから送信機へ入力。送信機は今のところロールとピッチ軸のみ外部入力を使うように設定。ArducopterのMission PlannerのRadio Calibrationの画面で確認すると、ジョイスティックを動かしたらRoll,Pichの制御ができることがわかります。 RCのトレーナー機能を使ってジョイスティックでドローンを制御 ------------------------------------------ RCのトレーナー機能を使ってジョイスティックでドローンを制御,その2 前エントリーの続きです。 実機を飛ばしてみたら制御できました。 実験装置↓ 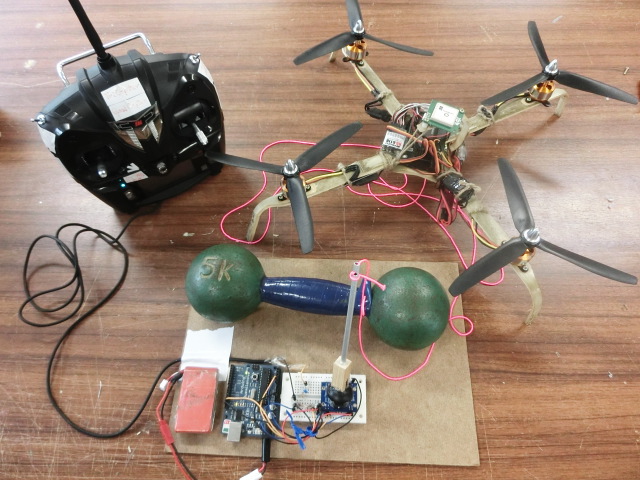 その時の写真↓ 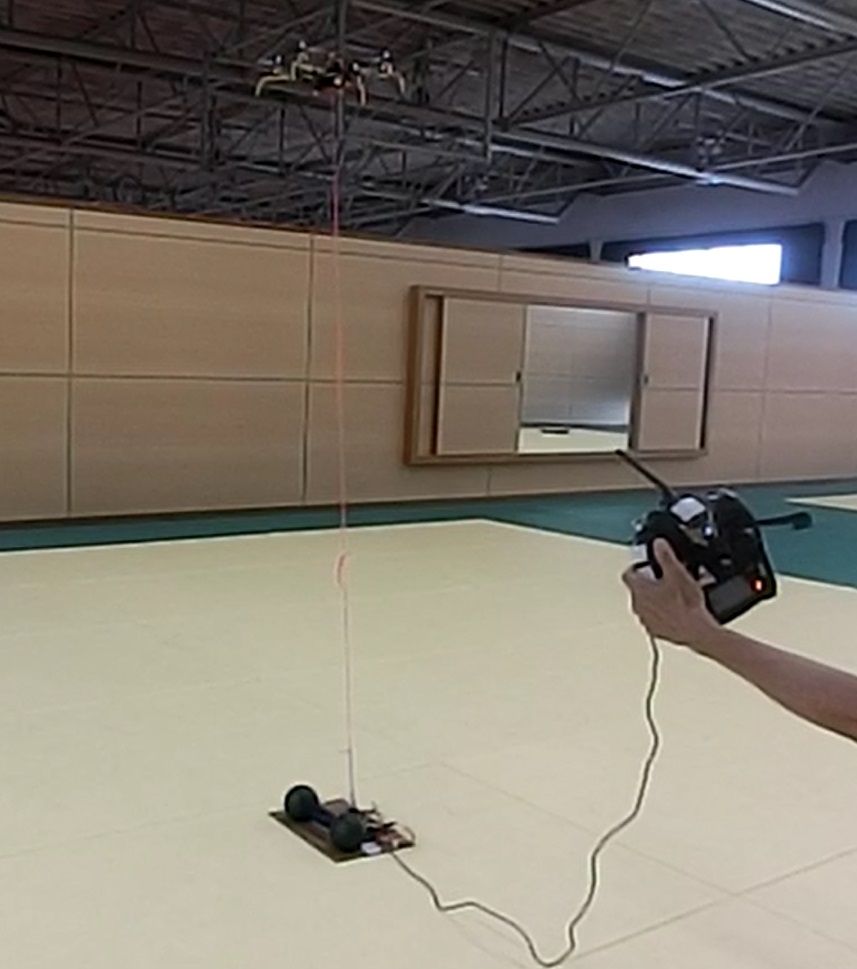 左手で持っているのはトレーナー機能の切り替えボタンを押しているため。 それ以外は操作していません。 床面に固定したスティックの角度をフィードバックしてマルチコプターの位置制御をしています。 ------------------------------------------ 有線でドローンを制御、真上に上がる凧上げドローンです。 前のエントリーはジョイスティックでドローン制御って書いたのですが、送信機のジョイスティックで操縦するのは当たり前じゃないの? と勘違いされたので補足説明。 真上に上がる凧上げドローンです。 有線(ライン)で引っ張ったところの真上をキープしてくれるドローンです。 安定のいいドローンは、係留するとだいたい安定して飛んでてくれますが、風が吹くと流されます。 GPSで安定化してるドローンは、GPSが届かないか途切れるとどんな挙動をするか分かりません。 でもこれは、真上に上がる凧状態です。風が拭いても真上キープです。 私が子供の頃に欲しくてTVCMで憧れた真上に上がる凧、ゲイラカイト状態です。 ちょっと違うのです。 前のエントリー↓ RCのトレーナー機能を使ってジョイスティックでドローンを制御,その2 動画をアップしました。 ドローンの有線コントロール ------------------------------------------ 広告↓  【お取り寄せ】DJI ファントム3 PHANTOM3 ADVANCED 【国内正規代理店商品】 アドバンス空撮 ドローン マルチコプター ラジコン FPV |



